
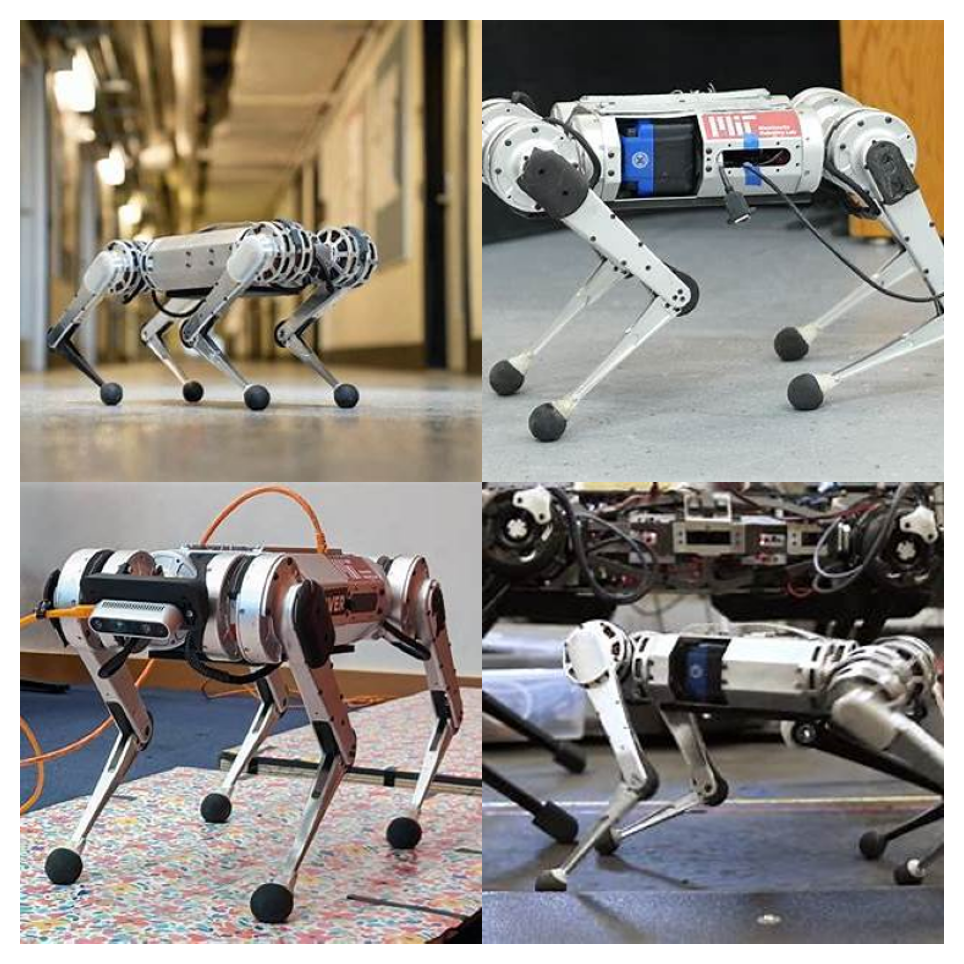
The Mini Cheetah reaches speeds of up to 3.9 m/s (~9 mph), can perform controlled backflips, and self-right after falling—all while weighing just ~20 lb (9 kg). Its lightweight design uses modular electric actuators derived from drone motors.
Why It Thrills & Matters
- Efficient & Lightweight: Electric motors outperform hydraulic systems—offering faster, quieter performance and easy modular design.
- Built for Resilience: Engineered to withstand high-impact landings and continue operating.
- Smart Terrain Training: Reinforcement learning simulated 100 days of training in only a few hours, enabling quick adaptation to diverse surfaces.
Broader Impacts in Robotics
Humanoid Mobility
Insights from Mini Cheetah’s balance and responsiveness inform future bipedal robots to walk and run with natural fluidity.
Disaster & Rescue Applications
The larger Cheetah III variant climbs stairs, navigates debris, and can be equipped with tools—designed for hazardous environments.
Human‑Aid Tech
Its actuator design influences prosthetics and mobility aids, bridging robotics and assistive technology.
📊 Quick Stats at a Glance
| Feature | Details |
|---|---|
| Top Speed | 3.9 m/s (~9 mph) |
| Weight | ~20 lb (9 kg) |
| Actuators | Modular electric motors |
| Key Capabilities | Backflips, self-righting, adaptive navigation |
| Training Method | Reinforcement learning in simulation |
| Advanced Variant | Cheetah III for rescue & inspection |
Why You Should Care
This robot is more than a novelty—it’s a blueprint for next-generation machines that can:
- Operate in **disaster zones**
- Enable fluid, natural humanoid movement
- Advance prosthetic and mobility technologies
🔗 Source & Further Reading: “Mini Cheetah is the first four‑legged robot to do a backflip” (MIT News)